
IHMC Robotics - Cybathlon Team
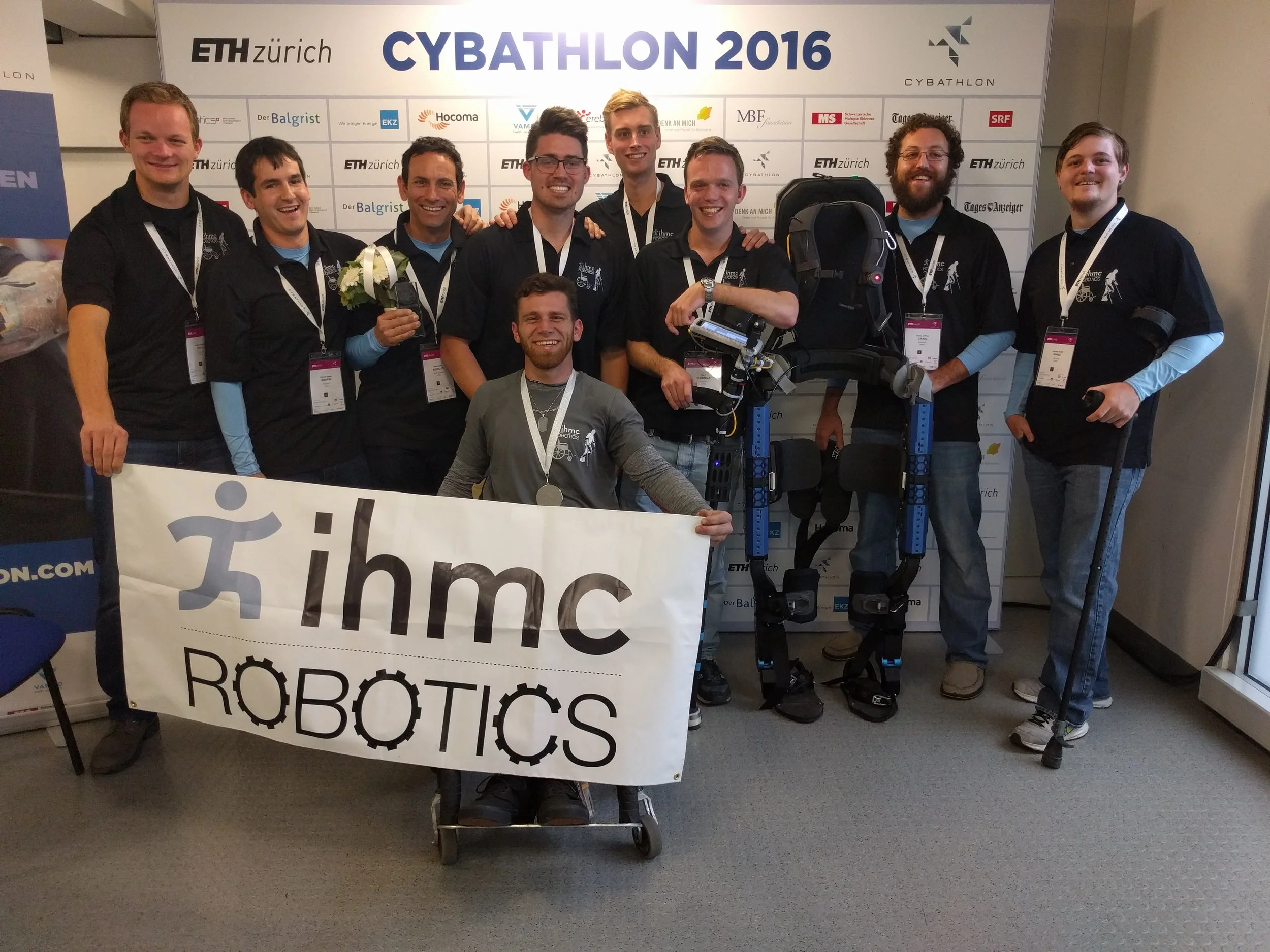
IHMC Robotics gets Silver Medal in Cybathlon
We competed in the first ever Cybathlon in October, 2016, in Zurich, Switzerland. The Cybathlon was a competition for disabled athletes using advanced assistive devices, including robotic technologies. This was an international competition with teams from the leading companies and universities from around the world. We were the only United States team competing in the Powered Exoskeleton Race. The Cybathlon was an important event to accelerate technology and showcase the advancements being made in robotics and other technologies to assist persons with disabilities.
The project was lead by Peter Neuhaus . Please contact him for more information pneuhaus@ihmc.us
The Cybathlon Powered Exoskeleton Race
(click to expand)
The race required that the pilot, the term used for the para-athlete wearing the exoskeleton, have a spinal cord injury with paralysis in the legs. The race started with the pilot wearing the exoskeleton seated on the sofa. There were six tasks related to daily life: getting up from a sofa, walking around obstacles, up a ramp to open and walk through a door, walk over stepping stones, walk over uneven floor, and walk up and down stairs. There were four identical obstacle courses with athletes competing head-to-head for the fastest time.
The Pilot

Mark Daniel was born and raised in Pensacola. He injured his spine almost 9 years ago and have been using a wheelchair since. In 2010, Mark assisted IHMC with evaluating their first powered exoskeleton. Since then, he been assisting IHMC with the evaluation and testing of their exoskeletons.
Mark recently joint IHMC as a full time research intern to work on the design, fabrication, and testing of the exoskeleton for the Cybathlon. Mark anticipates the Cybathlon to make a huge stride in technology and awareness to improve quality of life for those with loss of mobility due to injury or illness across the world. While working with IHMC, Mark will also be designing an off-road wheelchair for his next adventure. After the Cybathlon, Mark will make the first attempt by a paraplegic to complete the 4,834 mile American Discovery Trail.
The Team

IHMC Robotics is recognized internationally for our work on legged robots. One of our recent highlights in placing second in the DARPA Robotics Challenge Finals in 2015. The IHMC Robotics team is made up of engineers and scientists who are passionate about this event and devoted to developing assistive technologies. We have been developing exoskeletons and wearable robotic devices for the past 10 years with two of our previous powered exoskeletons
previous powered exoskeletons having assisted people with spinal cord injuries to walk.
The Technology
We developed a new exoskeleton, Mina v2, for this challenge. This exoskeleton features a new actuator design that has been proven out in our Grasshopper exercise device. This version has the addition of powered ankles, which lead to faster and more stable walking than with our previous versions. The foot plates have integrated pressure sensors to be able to measure how and where the pilot’s weight is on each foot. This will eventually the pilot and control system to know when he is about to lose balance and either one can then make the proper adjustment.












