
Autonomous Humanoid Behaviors
Development of a Behavior Architecture
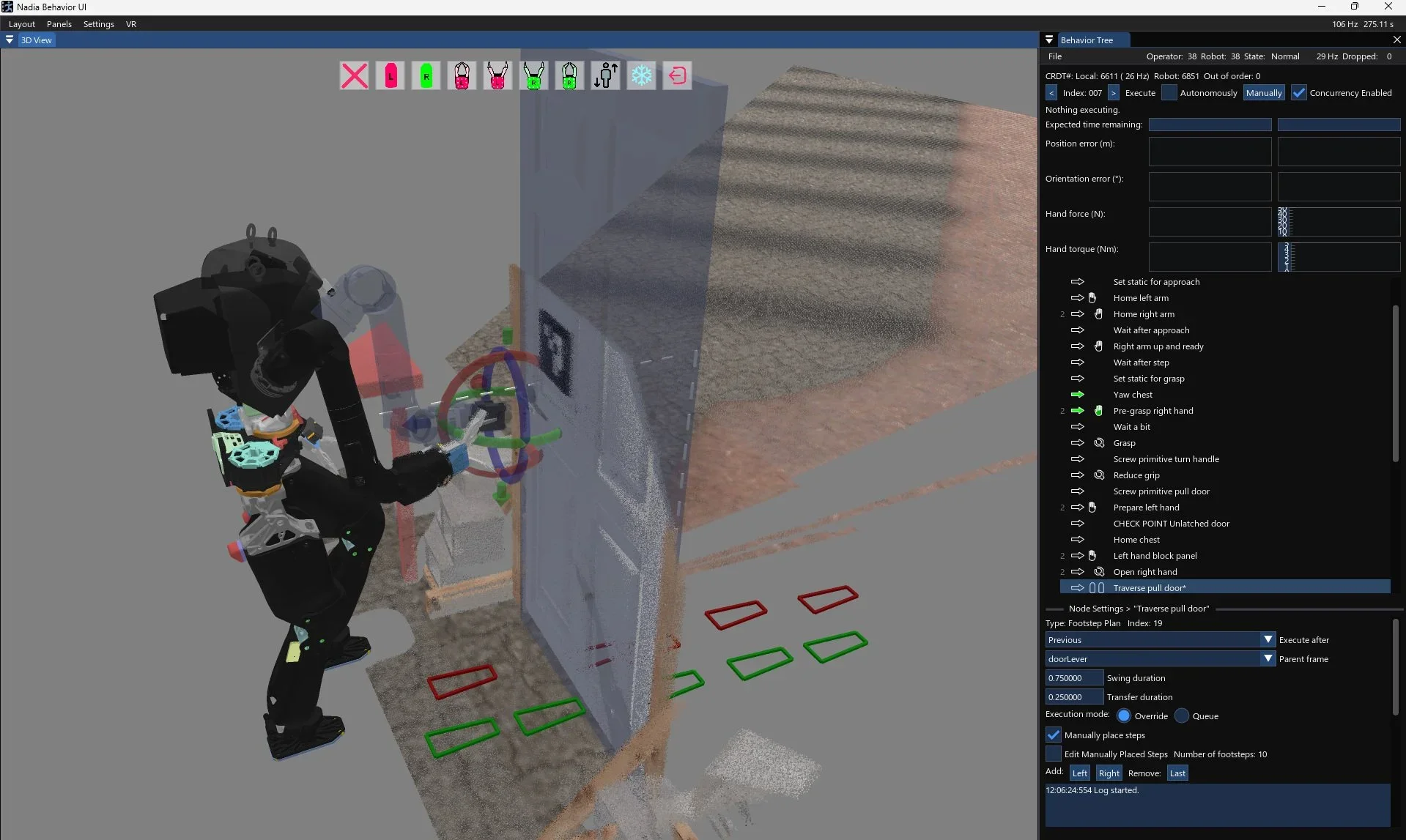
We are developing a scalable behavior architecture that breaks down complex behaviors into modular, primitive actions. These actions can be edited through a custom interface, which visualizes a digital twin of the robot and its environment, reconstructed using both proprioceptive and exteroceptive sensors. Our goal is for the primitive actions to be defined by parameterized objectives for the robot’s controllable rigid bodies. These objectives can be set or adjusted by the user, set by an external reasoning module, or derived from a learned policy. We believe that by structuring behaviors in this way, we can create more adaptable and easily directable robot behaviors.
Autonomous Urban Exploration
Using our behavior architecture, we have developed several urban exploration behaviors, including the ability to open and traverse different types of doors, clear obstacles, and conduct room searches. These behaviors are designed to be adaptable and robust, enabling the robot to navigate and interact with complex, unstructured environments efficiently.
We are currently developing more autonomous behaviors and integrating high-level reasoning modules to improve the overall coordination and reactivity of behaviors. This will allow the robot to make more informed decisions and adapt to dynamic environments with greater autonomy, enhancing its ability to operate in complex scenarios.
Learning Behaviors
We are also utilizing reinforcement learning to develop sophisticated locomotion policies for our robots. Preliminary results on flat terrain are promising, indicating the potential to navigate rough or broken terrains using height maps. Furthermore, we are expanding our locomotion capabilities to include modalities such as jumping and crawling, thereby increasing the adaptability and versatility of our humanoid and legged robots.
These advancements not only enhance the robots' ability to perform complex tasks autonomously but also strengthen their role as effective teammates in collaborative settings. By combining autonomous behavior development with robust human-machine interfaces, we are paving the way for robots that can seamlessly integrate into diverse and challenging environments, supporting and enhancing human efforts in various applications.
Gallery