
Enhancing the human condition through robotics.
IHMC researchers are pushing the envelope of what is possible in the domain of robotics. Our team consists of engineers, computer scientists, physicists, mathematicians, biomechanists, among many other skillsets focusing on several different research areas…

Legged Robots
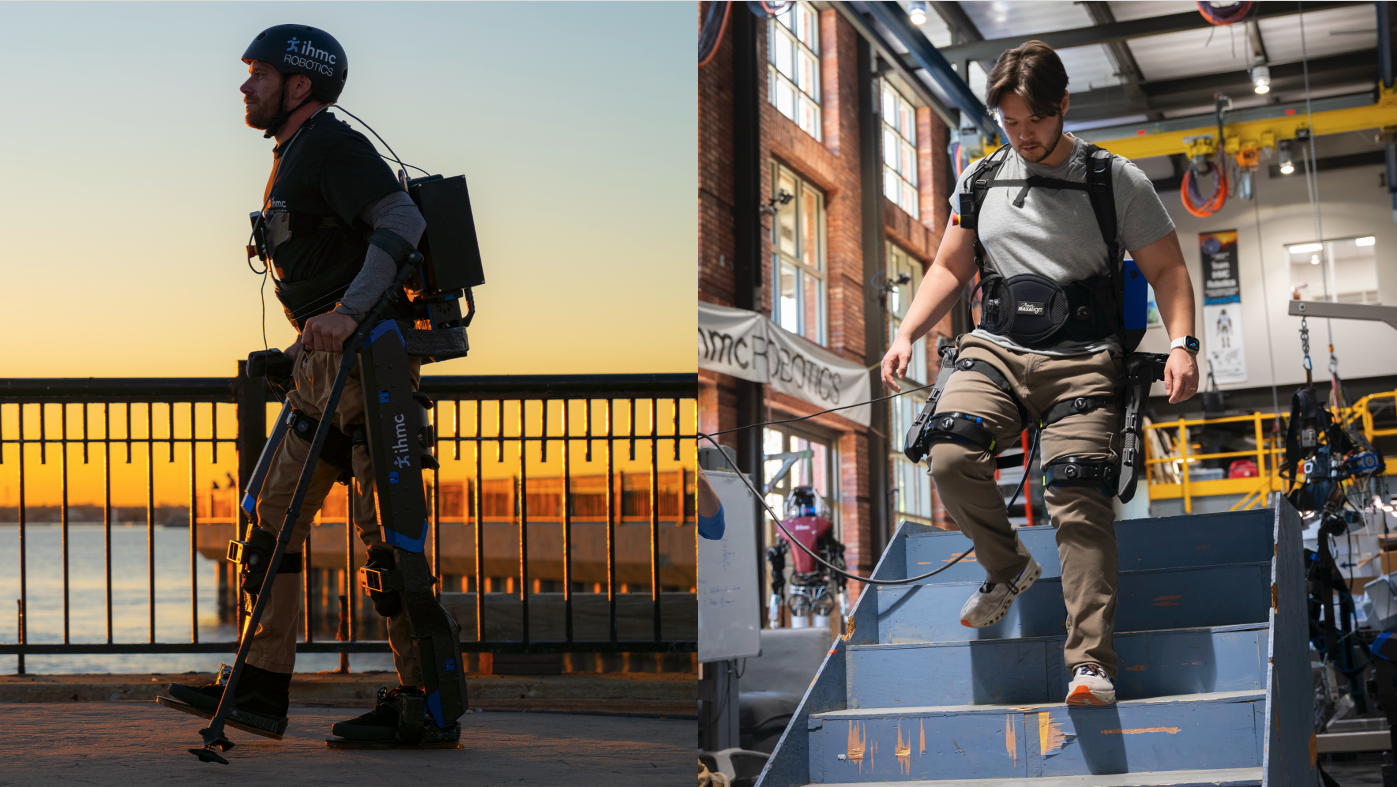
Exoskeletons

Human-Machine Teaming

Public Outreach
