
VRC Hightlights - February 28, 2013

This video shows the latest progress of the IHMC DARPA Robotics Challenge team. It focuses heavily on walking capabilities, but also includes some other developments such as multi-contact balance and steering wheel control. In the walking work, we tried to address a variety of challenges to bipedal locomotion that might be encountered during a disaster response.
30 DoF Robot Climbing Steep Stairs
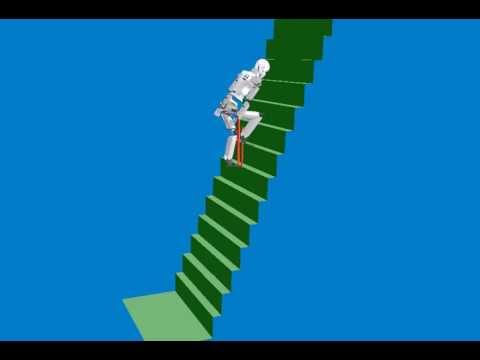
A 30 DoF simulated test robot climbing stairs with a rise of 35 cm and a tread of only 15 cm at a rate of 7.9 seconds per ten steps. Stairs this steep disallow the use of the full foot polygon to balance on a step by CoP placement, forcing us to focus on the use of angular momentum and improved weight distribution algorithms for balance control.
Simple Force Controlled Manipulation
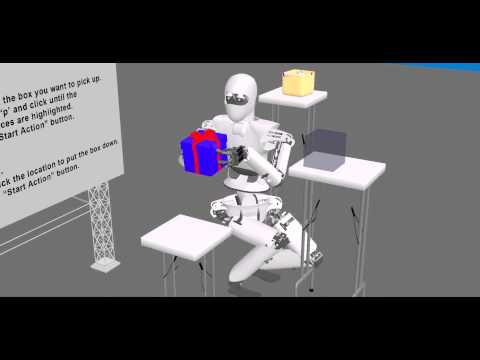
Demo0 - the first internal demo for the IHMC Darpa Robotics Challenge Effort. Since most of the efforts of the IHMC Robotics lab have been in bipedal locomotion, we felt a need to show ourselves that we could do basic manipulation as well.
Steering Wheel

DRC driving task outtakes. The GFE robot sits on a box and is supposed to manipulate the steering wheel (which is comically large for testing purposes). There was a bug in the specification of the desired configurations of the hands with respect to the steering wheel, resulting in the behavior shown in the video.