
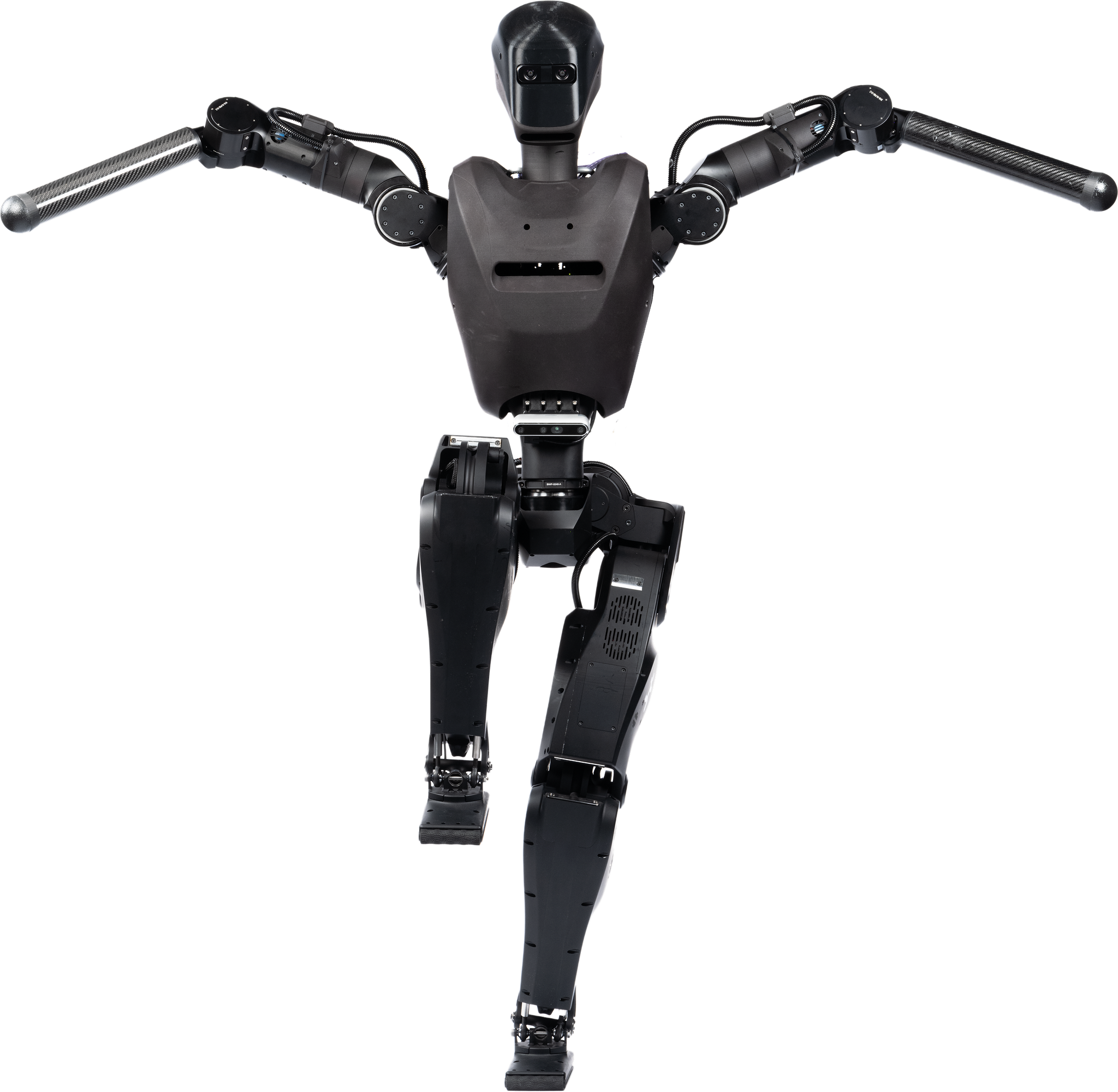
Alex, IHMC’s Humanoid Robot

IHMC has developed their newest humanoid robot, Alex. Alex builds off the success of Nadia, featuring high power, custom actuators, as well as completely onboard computation, perception, and power. This allows Alex to go where Nadia couldn’t - outside. Alex is being used across our projects, focusing on mobility, power, and autonomous and semi-autonomous behaviors to allow the robot to function both outside and in urban environments and structures. The development of Alex is funded through several sources, including the Office of Naval Research (ONR), Army Research Laboratory (ARL), and Army Data Analysis Center (DAC).
The Alex project is intended to develop highly mobile ground robots that can function in indoor environments where stairs, ladders, and debris would require a robot to have the same range of motion as a human. As we see today, there are nearly an infinite number of applications for humanoid robots. We’re focusing on giving Alex the right set of capabilities to function as a human teammate, providing the capability to extend human presence without placing someone in harm’s way.
Power-dense Quasi-Direct Drive Actuators
Alex is powered entirely by custom, highly backdriveable, powerful quasi-direct drive actuators. Leveraging careful designed cycloidal transmissions, this enables Alex to be robust, fast, and strong, while also allowing for highly efficient, natural motions. These designs are an iteration of the actuators made for Nadia’s arms, keeping all the good parts while focusing on robustness and modularity.



Compact, Motion Informed Design
Alex is designed to be flexible, while not compromising its agility. Across its 29 joints, we spent significant time thinking about the performance requirements for each of the tasks we want the robot to execute. This will give Alex the ability to reach places that are impossible to achieve with traditional robots, enabling an extreme level of mobility and agility.