
Exoskeletons
From spinal cord injury rehabilitation to outdoor heavy-duty manual labor, exoskeleton technology holds great promise in extending human capability and augmenting performance. IHMC has over a decade of experience researching mobility-restoring exoskeletons showcased by the 2016 and 2020 Cybathlon competitions and Toyota Mobility Foundation Mobility Unlimited Challenge. In recent years, IHMC is focused on developing new ability-augmenting exoskeletons for use in radioactive waste cleanup.
Link

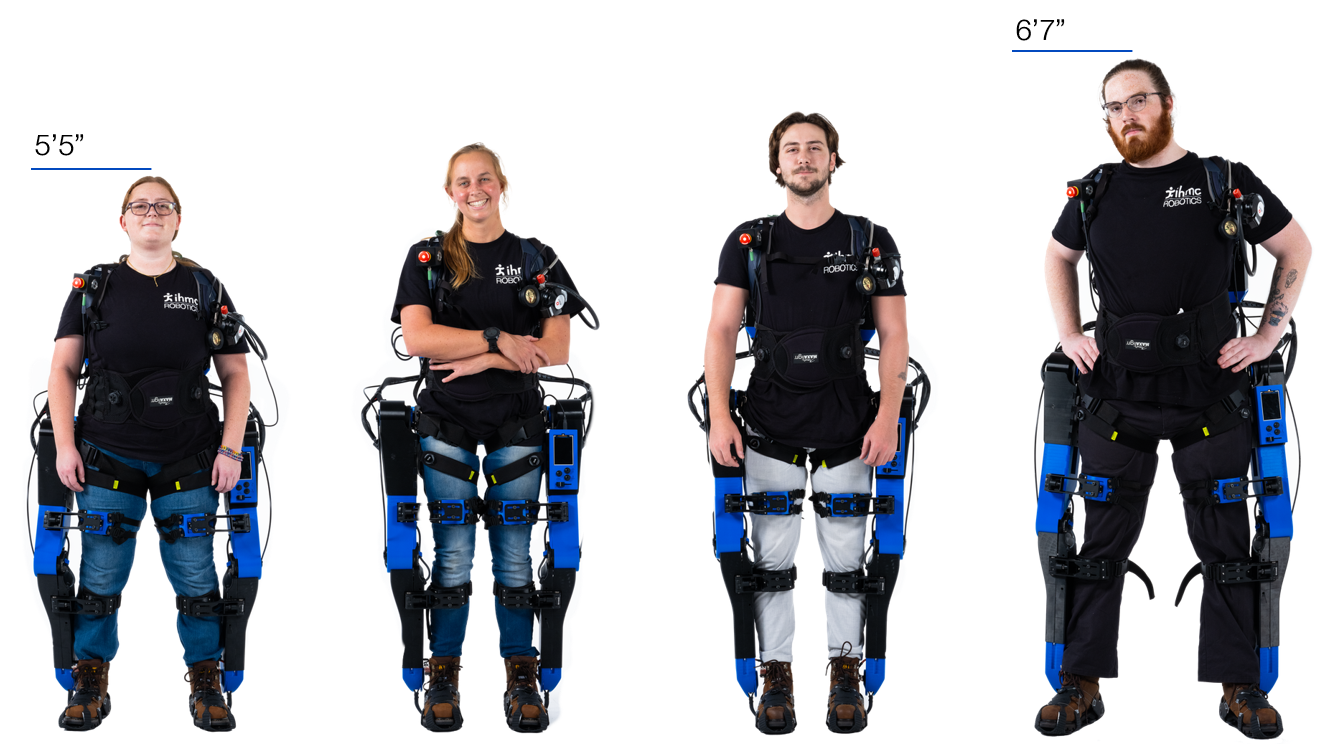
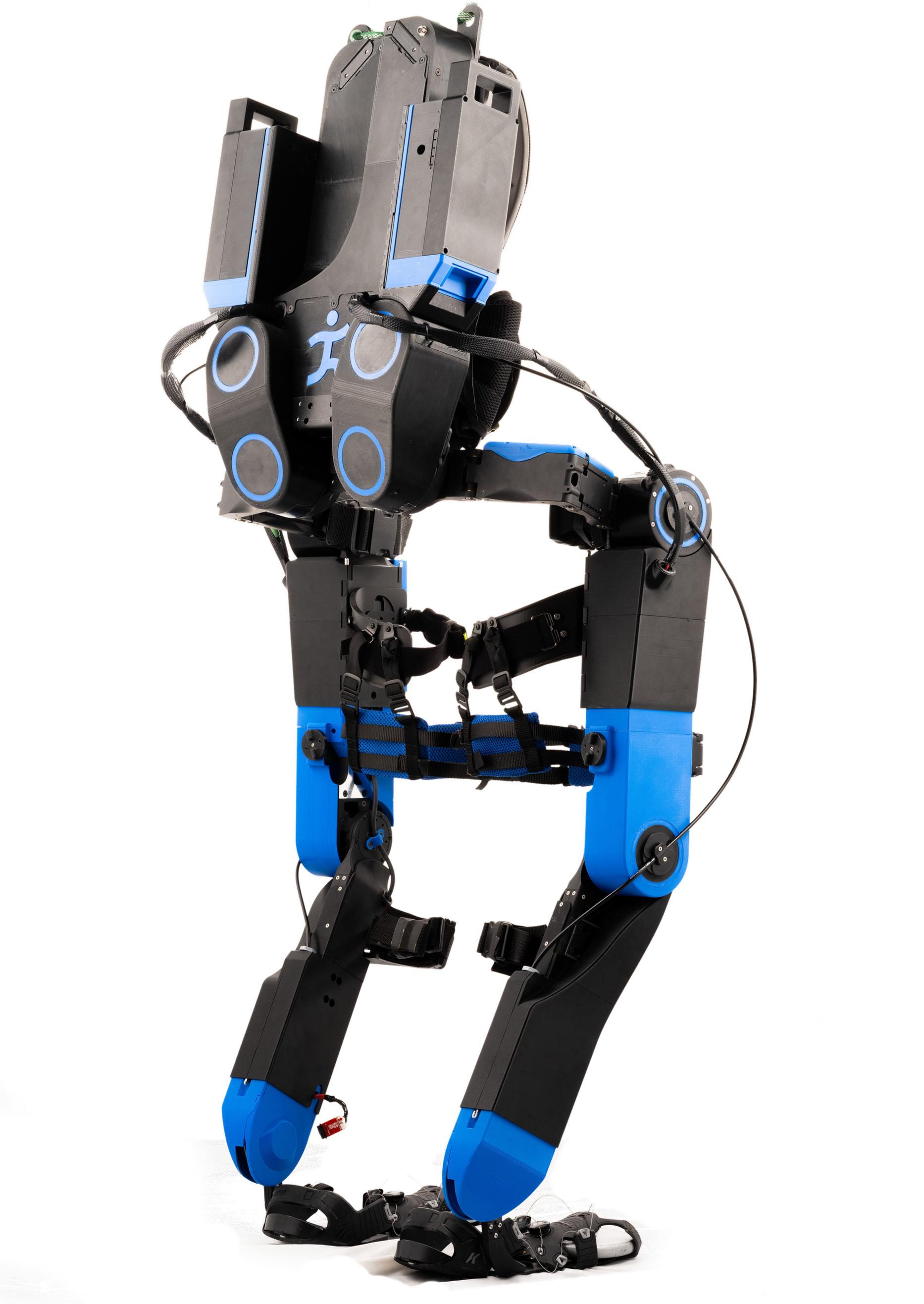
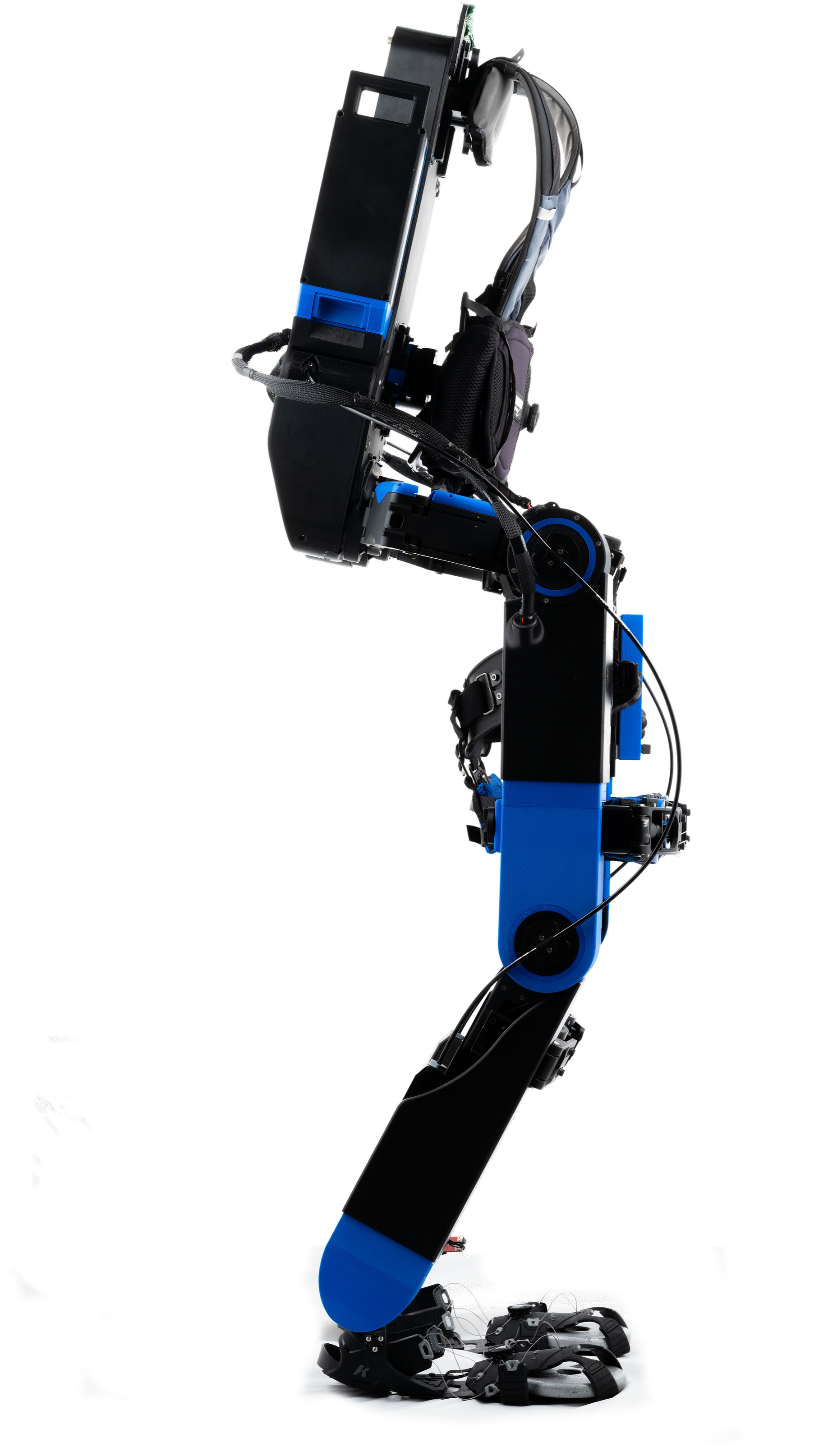
Link is a modular exoskeleton aimed at assisting able-bodied users with difficult, unstructured tasks in dangerous or hazardous environments. It starts as a hip exoskeleton and can be easily expanded to assist more of the body by attaching the knee actuators. The goal of Link is to be a catch-all device that can be configured to assist a single region of the body (hips, knees, ankles, etc.), expanded to assist the whole body, or numerous combinations in between depending on the needs of the task at hand. It can also be used to carry worn loads if fully connected to the ground, building off the previous work developed during the Eva project.
Modularity at the Core
Link uses custom-designed actuator modules that are highly efficient and torque dense. These modules are linked together through interchangeable carbon fiber linkages with embedded sensing that provide high strength-to-weight ratio and critical motion information to the onboard computer. This method makes sizing the exoskeleton and adjusting the number of utilized joints simple and fast.
AI-powered Control
Link is controlled through human motion estimation algorithms trained off of wide datasets of biomechanics measurements; predicting the internal biomechanics of the user through kinematic sensing and applying compensatory torques through the actuators. Numerous methods are currently being developed to better enhance control, including algorithms that utilize only kinematics.





Build and go
Eva
(Legacy)

Eva is a powered lower-body exoskeleton that is being developed by IHMC to offload the weight of heavy personal-protective equipment from users’ bodies to the ground while also augmenting user motion. Funded by the Department of Energy (DOE) and with Sandia National Labs, the suit is designed to assist throughout the users’ natural range of motion so as to not restrict movements.
The suit provides net positive power to hip and knee flexion/extension as well as ankle plantarflexion while passively allowing motion in other degrees of freedom of the hips. The hips and knees are driven by collocated brushless DC motor actuators, while the ankles are driven by cables attached to actuators located in the backpack. Also within the backpack is a custom power system, which enables battery-powered operation as well as charge monitoring. Outside of the backpack, an SCBA tank can be mounted using a custom harness, allowing for direct integration with common nuclear site PPE.
Eva is also features a wide array of adjustable features (i.e. length adjustable thighs and shanks, depth and width adjustable leg interfaces, height adjustable torso brace and backpack straps, size adjustable foot attachments) and can fit a wide range of body types.
Offset Heavy Gear
Eva utilizes an inverse-dynamics-based gravity compensation control to offload the weight of itself and added PPE regardless of body position. It calculates the static torques required to resist both the gravitational forces on each link and the ground reaction forces being imparted on the feet. The control algorithm uses information about the exoskeleton’s mass, inertia, and geometry as well as the centers of pressure and force distribution of the user’s feet sensed by pressure sensitive insoles in the user’s shoes. A custom on-board user interface (UI) allows the wearer to control the device from startup to shutdown, allowing for direct modulation of gravity compensation.
Along with gravity compensation, we have developed task-specific controllers aimed at assisting common manual labor movements (e.g. squatting/lifting, pushing/pulling, walking) as well as a machine-learning based task classifier to identify movement types and transition between controllers.



Load carriage - Inverse dynamics - High adjustability
Quix
(Legacy)

Quix is a powered exoskeleton that IHMC developed to provide increased mobility and independence to people with lower-limb paralysis. The device allows users to stand up and walk through a variety of environments, including up and down stairs and ramps, and across both flat and bumpy terrain. It is the fourth exoskeleton prototype developed from the ground up by researchers and engineers at IHMC.
Powered actuation at the hip (both flexion/extension and adduction/abduction), knee (flexion/extension), and ankle (plantarflexion/dorsiflexion) provide smooth and natural walking motions. These eight actuators enable the device to exhibit a wide variety of movements, utilizing a combination of actuation in both the sagittal and frontal planes. Each actuator weighs about 2.5 kg and can achieve a peak torque of 200 Nm and peak speed of 7 rad/s. The exoskeleton is powered by two 6S lithium polymer batteries that supply a maximum operating time of approximately half an hour of heavy usage. These batteries are housed in the backpack and can be hot-swapped to allow for extended run times.
Each actuator houses its own required electronics, including a motor driver and logic board. The actuators in each leg are daisy-chained to each other by the power and data lines that originate in the backpack. The software control algorithms are dependent on commands from the pilot and feedback from the exoskeleton’s sensor suite. A set of push buttons and an LCD screen on the crutch transmits commands, allowing the user to select different behaviors such as sitting, standing, and walking at different speeds on level ground, slopes and stairs.
Quix Pilot - Mark Daniel
Quix is designed for people like Mark Daniel, co-creator of IHMC’s powered exoskeletons. Mark was paralyzed as the result of an automobile accident over a decade ago. In 2016, Mark piloted IHMC’s Mina v2 prototype at the 2016 Cybathlon and took home the Silver Medal.
Designer, evaluator, and user representative, Mark was born and raised in Pensacola. As a young adult he graduated high school early and pursued a career in ironwork, first going to trade school for diesel mechanics, then learning how to weld and fabricate. In 2007, at eighteen years old, Mark started his career and began planning his next steps. Working long hours in risky conditions was exciting at first, but after five months the work took its toll. He fell asleep driving home, flipping his SUV several times, and awoke in the ICU of a local hospital. After learning of his paralysis, he set out to regain his independence.





